During the summer before my freshman year of college I came up with a project that I hoped would expand my skillset for the fun of it. This project was to build my own remote-controlled boat, including designing and making the transceiver to control the boat. I found a few tutorials I planned on combining to guide me through the project, including a set of plans for a balsawood boat, and a guide on interfacing Arduinos with radio modules. I’ll admit at the time I was a bit in over my head, but I had confidence that I’d be able to figure it all out. I took a break from working on the project for almost two years, over which I worked on many other projects that expanded many relevant skillsets. I picked it back up with much more confidence in my ability to complete the project.
I finished the hull, created a rudder mechanism controlled by a servo and a propeller actuated by a small brushless motor. I designed and made circuit boards to connect the Arduino Nano to the actuators and IMU in the boat, and to the controls and screen in the transceiver. I modeled and made the transceiver housing, and painstakingly wrote the code to create an interactive menu on the transceiver that controls the configuration of the joysticks and units, and displays approximate rudder position and forward velocity. I extensively documented the project in a work log.
the transmitter
The main menu
|

The interface to control the boat
|

The control settings
|
The unit settings
|

The completed transmitter.
|

The transmitter with a clear acrylic faceplate.
|
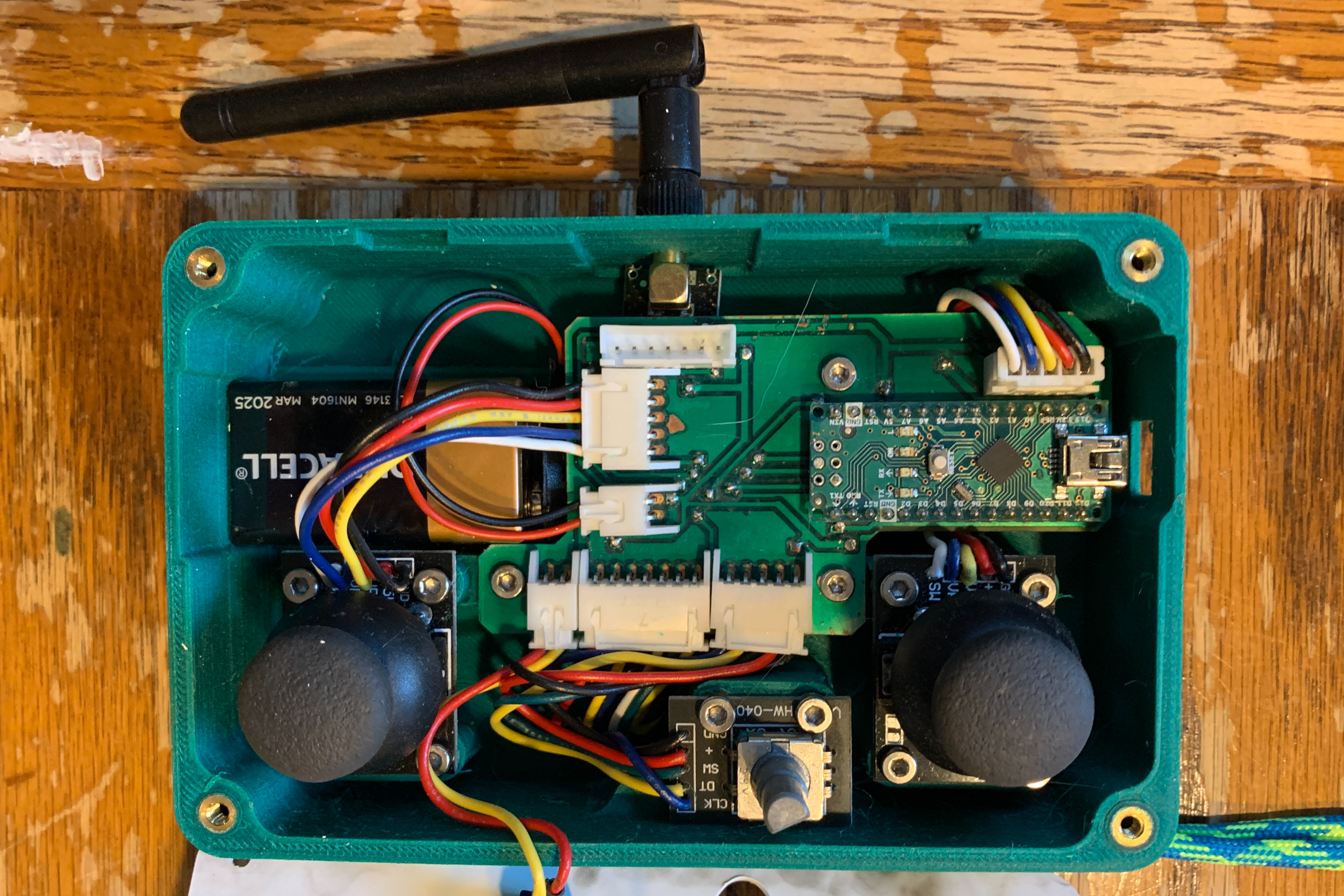
The inside of the transmitter.
space
|
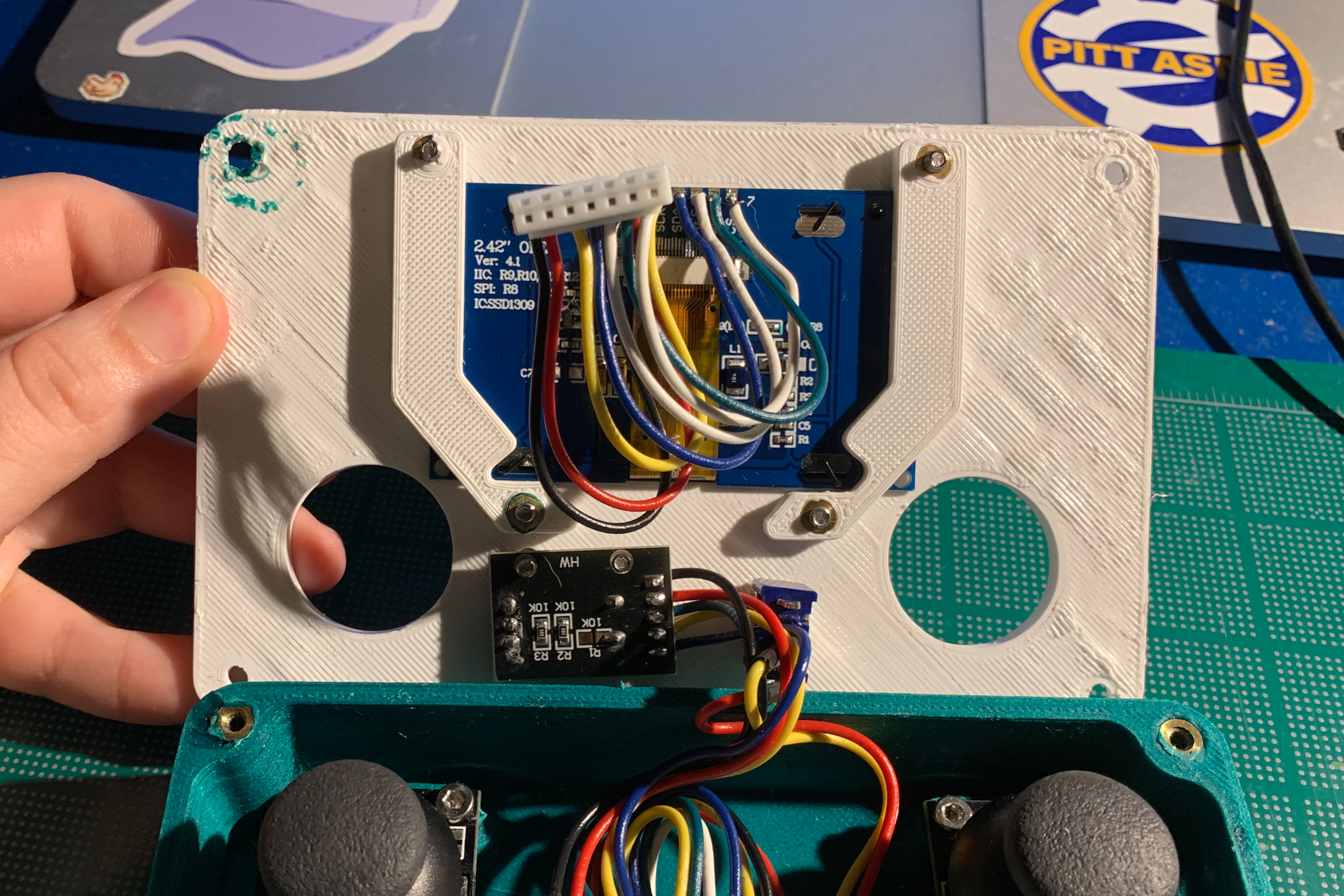
An older iteration of the transmitter, however the method for mounting the OLED is the same.
|
the boat
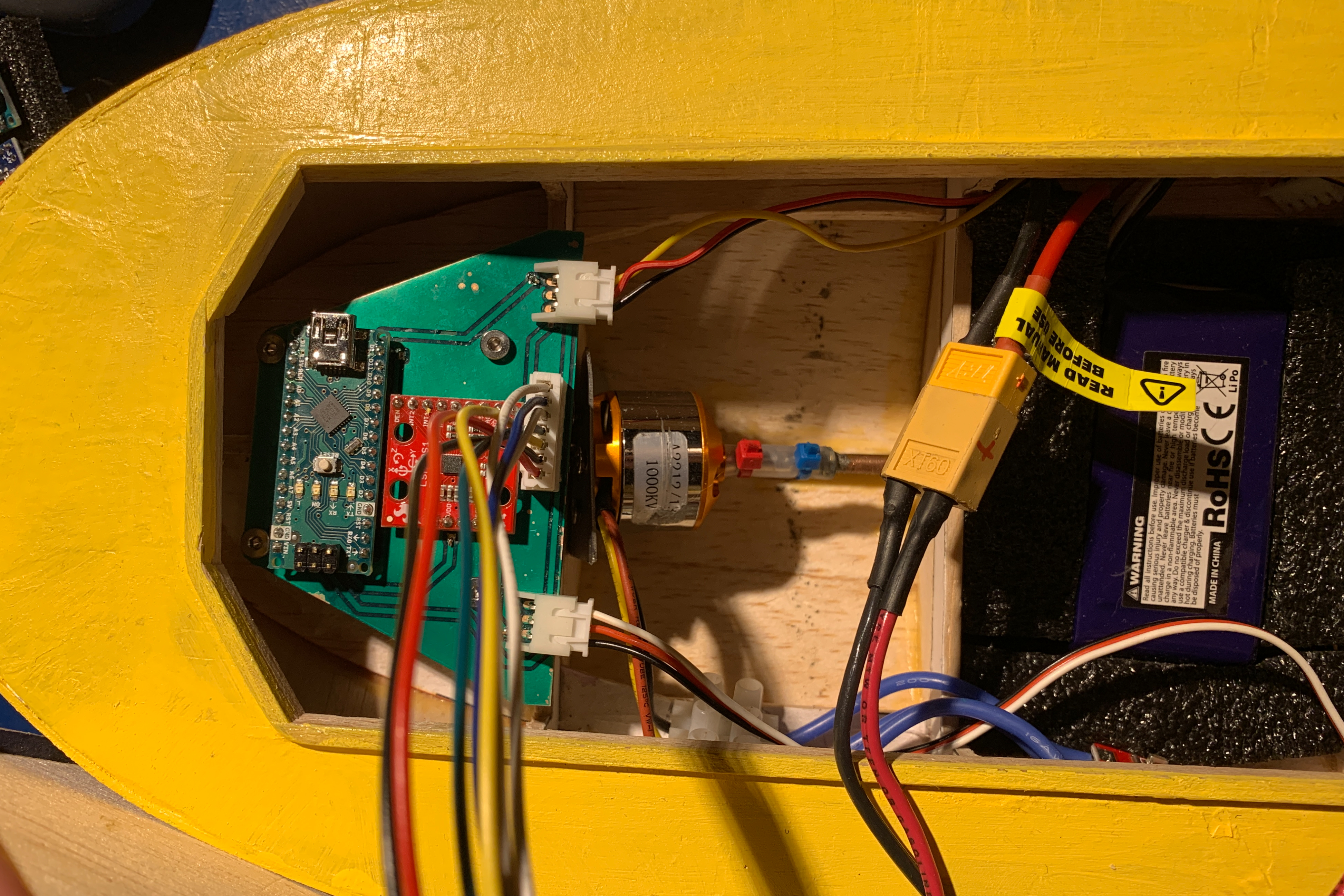
The boat's PCB, with the IMU in the center.
|
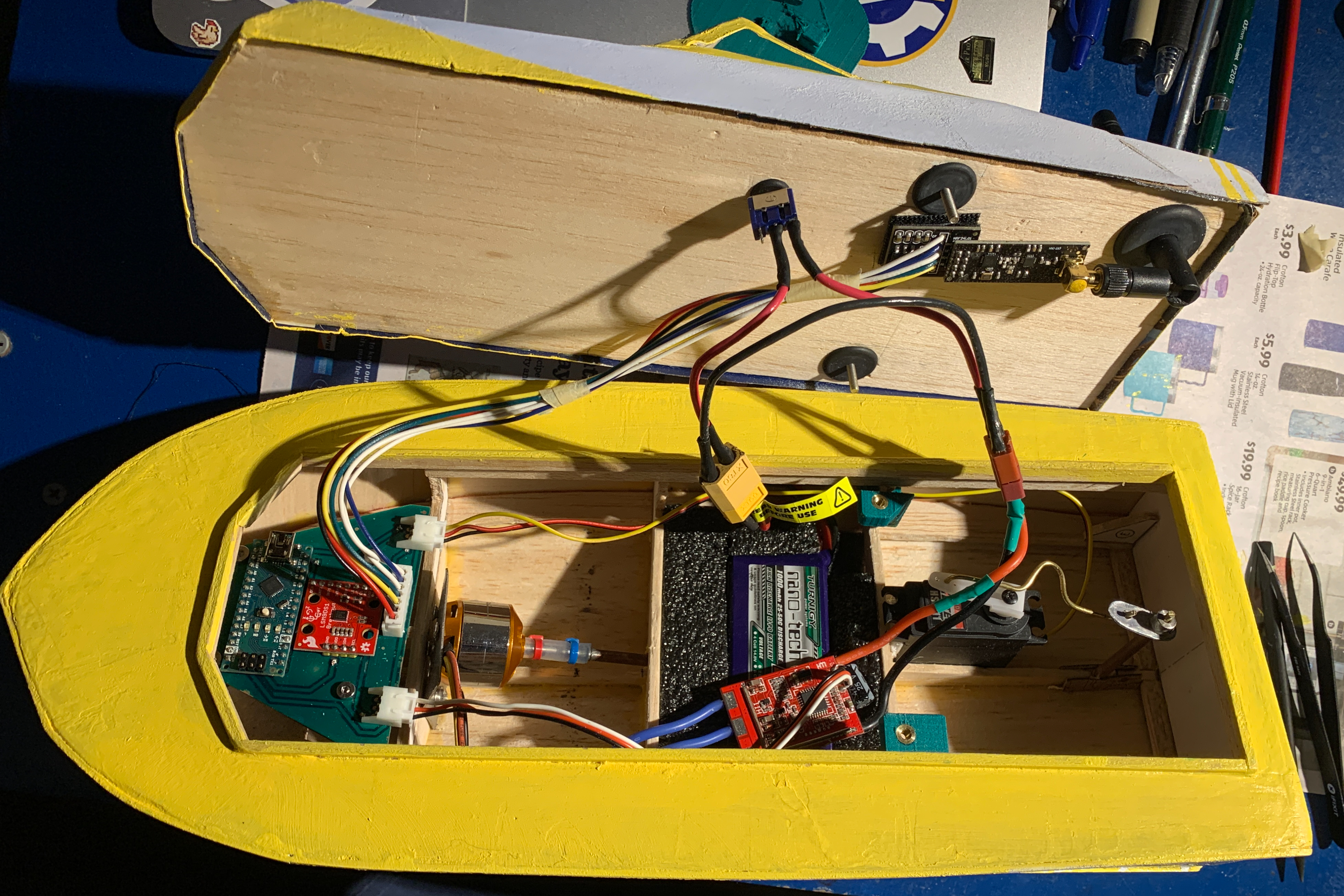
The internal wiring in the hull.
|
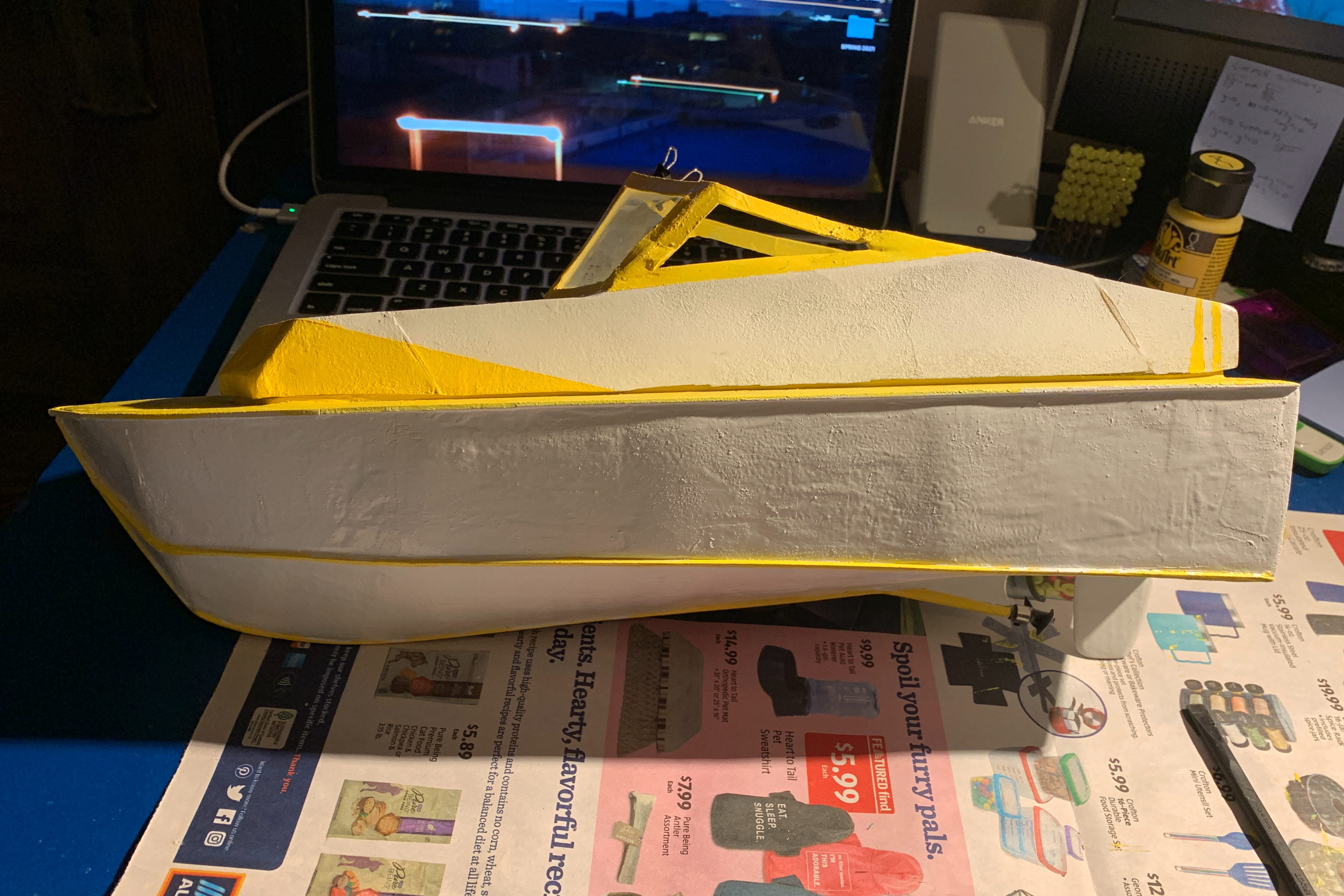
The outside of the boat after painting.
|
The boat running in a bathtub test!
|
the project worklog:
